Localization
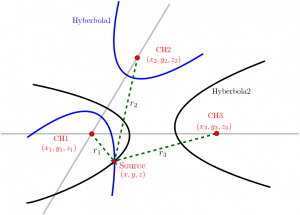
(1) The time difference of arrival (TDOA)-based localization
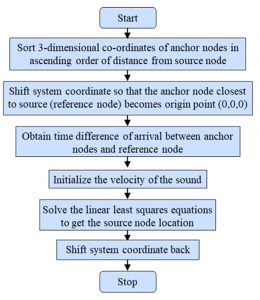 The flowchart for Linear Least Square Estimation (LLSE)
The flowchart for Linear Least Square Estimation (LLSE)  The flowchart for NLS with Gauss–Newton estimation
The flowchart for NLS with Gauss–Newton estimation 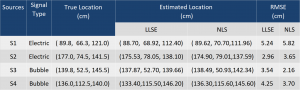 The results of localization using LLSE and NLS with Gauss–Newton estimation methods
The results of localization using LLSE and NLS with Gauss–Newton estimation methods
(2) The spectra ratio-based localization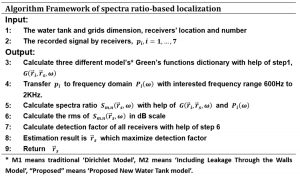
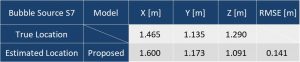 S7 source location is estimated by the proposed new water tank model with grids (10x10x10)
S7 source location is estimated by the proposed new water tank model with grids (10x10x10)
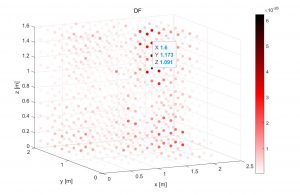 The detection factor (DF) in 3D space
The detection factor (DF) in 3D space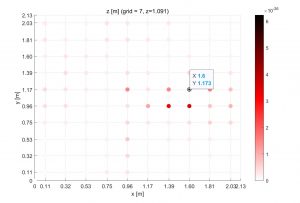 The detection factor (DF) in 2D (x-y plane) space at z-coordinate of 1.09m
The detection factor (DF) in 2D (x-y plane) space at z-coordinate of 1.09m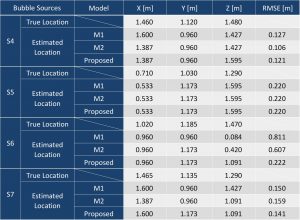 Source locations are estimated by three water tank models with grids (10x10x10)
Source locations are estimated by three water tank models with grids (10x10x10)